














Online



Принцип работы автоматического паллетизатора стальных труб
2025-10-23
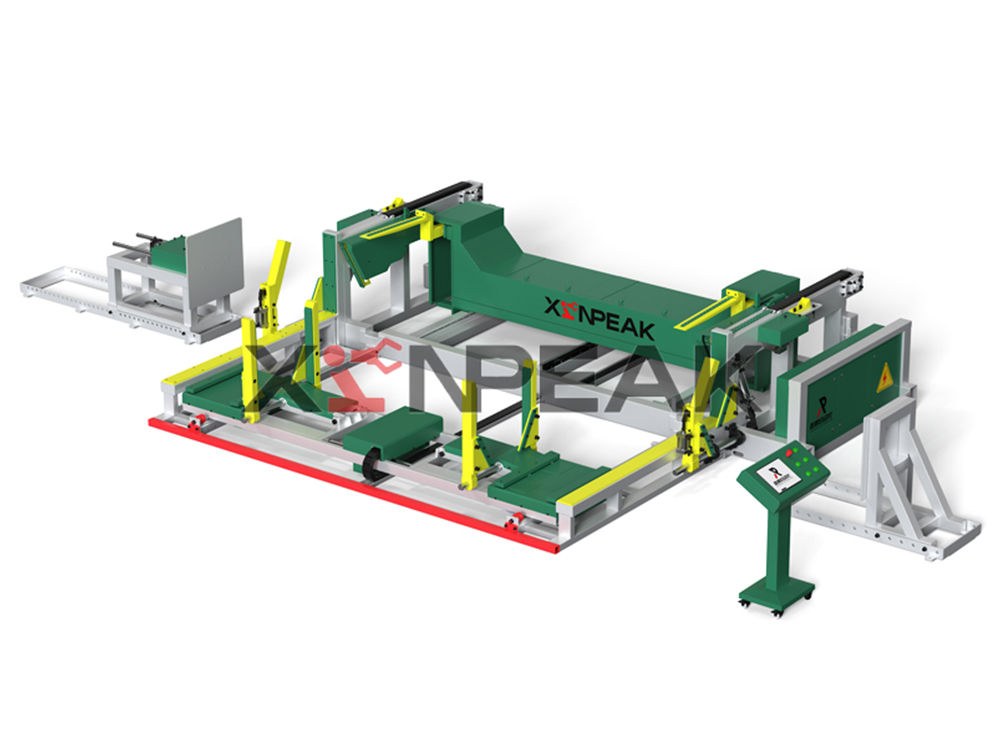
Принцип работы автоматического паллетизатора стальных труб основан на скоординированных действиях исполнительных механизмов, систем управления и датчиков. Запрограммированный заранее, он автоматически захватывает, перемещает и укладывает стальные трубы. Этот принцип можно разбить на следующие этапы:
1. Исполнительные механизмы: исполнительные механизмы механического движения
Исполнительные механизмы – это «мускулы» автоматического паллетизатора стальных труб, отвечающие за выполнение определенных физических движений. К ним относятся:
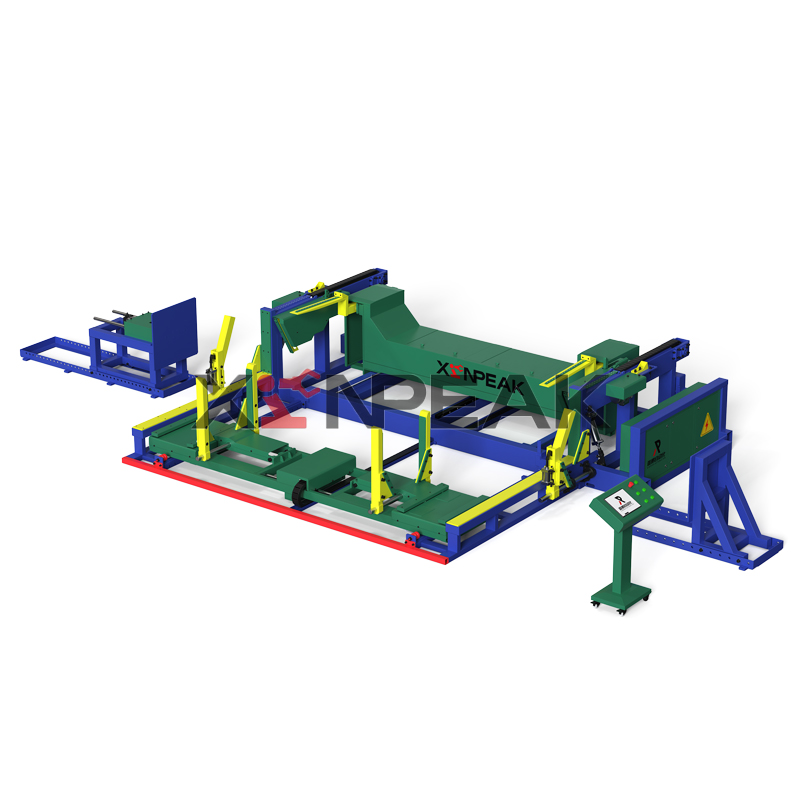
Подъемный механизм: приводимый в действие гидравлическими цилиндрами или двигателями, подъемный механизм регулирует высоту захватного механизма для размещения труб различной высоты или положения штабеля. Например, после доставки трубы в указанную зону подъемный механизм опускается на нужную высоту, обеспечивая точный контакт захватного механизма с трубой.
Поворотный механизм: захватный механизм вращается вокруг своей оси для регулировки положения трубы. Например, при паллетировании шестиугольных упаковок вращательный механизм поворачивает трубу на определённый угол, образуя шестиугольную конструкцию с другими трубами.
Телескопический механизм: Регулирует расстояние между захватным механизмом и трубой для обеспечения точного захвата. Например, если труба смещена, телескопический механизм выдвигается или втягивается, позволяя захватному механизму точно позиционировать трубу. Захватные устройства: Разработанные с учётом формы и размера стальных труб, эти устройства обычно используют электромагнитные присоски, зажимы или вакуумные присоски для надёжного захвата труб и предотвращения их падения во время перемещения. Например, электромагнитные присоски подходят для труб с гладкой поверхностью, а зажимы — для труб с шероховатой или фасонной поверхностью.
2. Система управления: Ядро логики автоматизации
Система управления — это «мозг» паллетизатора стальных труб, отвечающий за приём сигналов, формирование команд и управление движениями исполнительных механизмов. В его состав входят:
Приём сигналов: получение информации о прибытии, количестве и размере стальных труб с производственной линии или других датчиков. Например, когда стальные трубы поступают в рабочую зону паллетизатора по конвейерной ленте, датчики положения отправляют сигналы в систему управления.
Запрограммированные инструкции: формирование запрограммированных инструкций для управления движениями приводов на основе заданных правил и требований паллетирования. Например, система управления рассчитывает траекторию движения и усилие захвата на основе размера трубы и конфигурации штабеля.
Логические операции и управление движением: сложные логические операции и управление движением реализуются с помощью ПЛК (программируемого логического контроллера) или промышленного компьютера для обеспечения точности и стабильности процесса паллетирования. Например, ПЛК корректирует движения привода в режиме реального времени на основе обратной связи с датчиками, чтобы избежать столкновений или сбоев захвата.
III. Датчики: «глаза» и «уши» восприятия окружающей среды
Датчики — это «чувства» автоматического паллетизатора стальных труб, которые обнаруживают изменения во внешней среде и передают эту информацию в систему управления. К ним относятся:
Датчики положения: определяют положение стальной трубы и захвата для обеспечения точного захвата и размещения. Например, если стальная труба отклоняется от заданного положения, датчик положения посылает сигнал в систему управления для корректировки траектории захвата.
Датчики веса (при наличии): определяют вес стальной трубы, позволяя системе управления корректировать усилие захвата и способ укладки. Например, если вес стальной трубы превышает заданное значение, датчик веса посылает сигнал в систему управления для уменьшения усилия захвата во избежание повреждения трубы или оборудования.
Датчики зрения: используют технологию машинного зрения для определения формы, размера и положения стальной трубы, предоставляя системе управления точную информацию о захвате и размещении. Например, видеодатчик захватывает изображение стальной трубы, определяет её форму и размер с помощью алгоритма обработки изображений, а затем передаёт эту информацию в систему управления. IV. Рабочий процесс: полный замкнутый цикл от входа до выхода
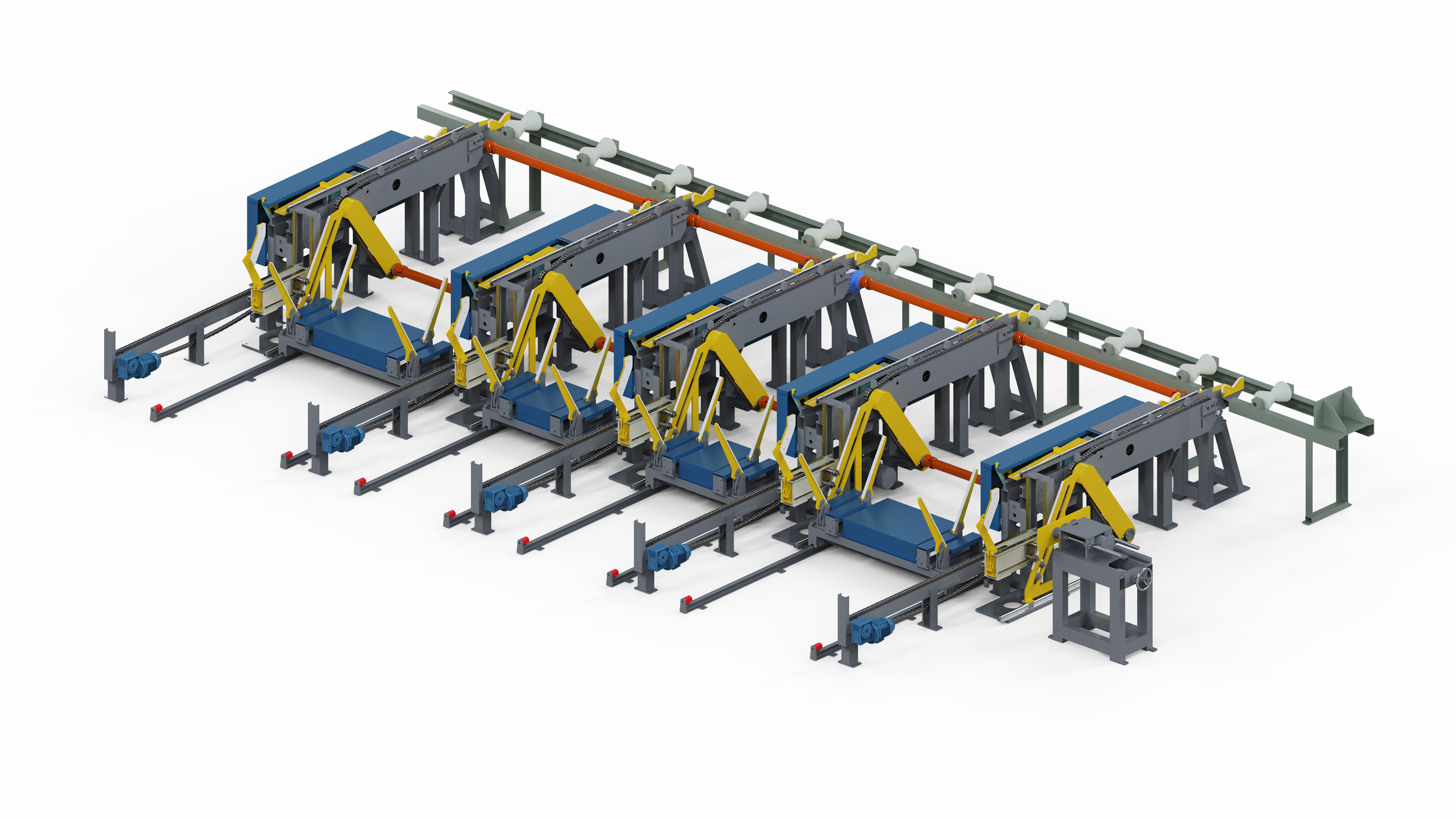
Рабочий процесс автоматического паллетизатора стальных труб можно разделить на следующие этапы:
Транспортировка продукции: стальные трубы транспортируются в рабочую зону паллетизатора с помощью конвейерной ленты или другого транспортного устройства. Например, после схода с производственной линии стальные трубы транспортируются конвейерной лентой в зону захвата паллетизатора.
Идентификация и позиционирование продукции: после попадания стальной трубы в рабочую зону паллетизатора система машинного зрения или датчик идентифицирует и определяет её положение, форму и размеры. Например, видеодатчик захватывает изображение трубы и использует алгоритм обработки изображений для определения её положения и размеров.
Захват и укладка: на основе результатов идентификации и позиционирования робот-манипулятор точно захватывает трубу и укладывает её в указанное место. Например, согласно инструкциям системы управления, захват опускается к месту расположения трубы, захватывает её, затем поднимается и перемещается в положение штабелирования, размещая её в заданном месте.
Завершение и контроль паллетизации: После укладки одного или нескольких слоёв стальных труб паллетизатор проводит самопроверку или ожидает ручной проверки, чтобы убедиться в качестве и устойчивости штабеля. Например, паллетизатор проверяет аккуратность и устойчивость штабеля с помощью видеодатчиков или датчиков положения. При обнаружении каких-либо проблем он вносит соответствующие коррективы или перезапускает паллетизацию.
Свежие новости
Каковы основные характеристики автоматических паллетизаторов стальных труб?
Каковы сферы применения автоматических паллетизаторов для стальных труб?
Паллетизаторы для стальных труб: вариант повышения эффективности и экономии средств
Введение в паллетизаторы для круглых и квадратных труб
Основные характеристики автоматических паллетизаторов стальных труб включают в себя их высокую эффективность, точность, гибкость, стабильность, безопасность, интеллектуальность

Автоматические паллетизаторы для стальных труб используют технологию автоматизации для эффективного и точного штабелирования стальных труб. Они широко используются в ситуациях, требующих повышения эффективности производства
При выборе паллетизатора для стальных труб отдавайте предпочтение моделям, оснащенным интеллектуальным планированием маршрута, высокоточными датчиками и легкими, но прочными роботизированными манипуляторами.
Паллетизатор для круглых и квадратных труб — это автоматизированная машина для паллетирования, предназначенная для круглых и квадратных труб. Благодаря согласованной работе магнитного присоса
Связаться с нами
Вы можете связаться с нами через следующие четыре способа. Мы ответим на ваш запрос в течение 2-8 часов после получения!
Позвонить нам
Отправить электронное письмо
Оставить сообщение
Добавить в WeChat или WhatsApp





