














Online



Каковы основные компоненты паллетизатора стальных труб?
2025-09-19
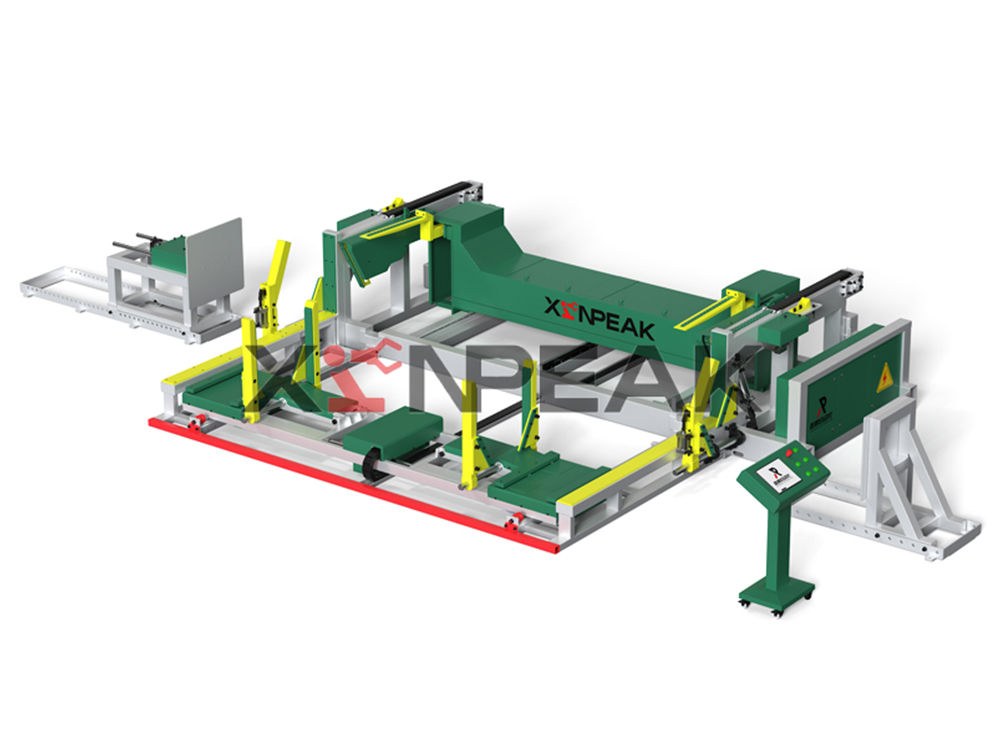
К основным компонентам паллетизатора стальных труб относятся, в первую очередь, приводы, системы управления, датчики, системы электропитания и передачи, а также устройства безопасности. Эти компоненты работают вместе для автоматического захвата, перемещения и укладки стальных труб. Ниже приведено подробное описание:
Привод
Привод является ключевым компонентом процесса паллетизации паллетизатора стальных труб и обычно включает в себя:
Подъемный механизм: регулирует высоту захватного механизма для облегчения захвата стальных труб разной высоты или их размещения в желаемом положении штабелирования.
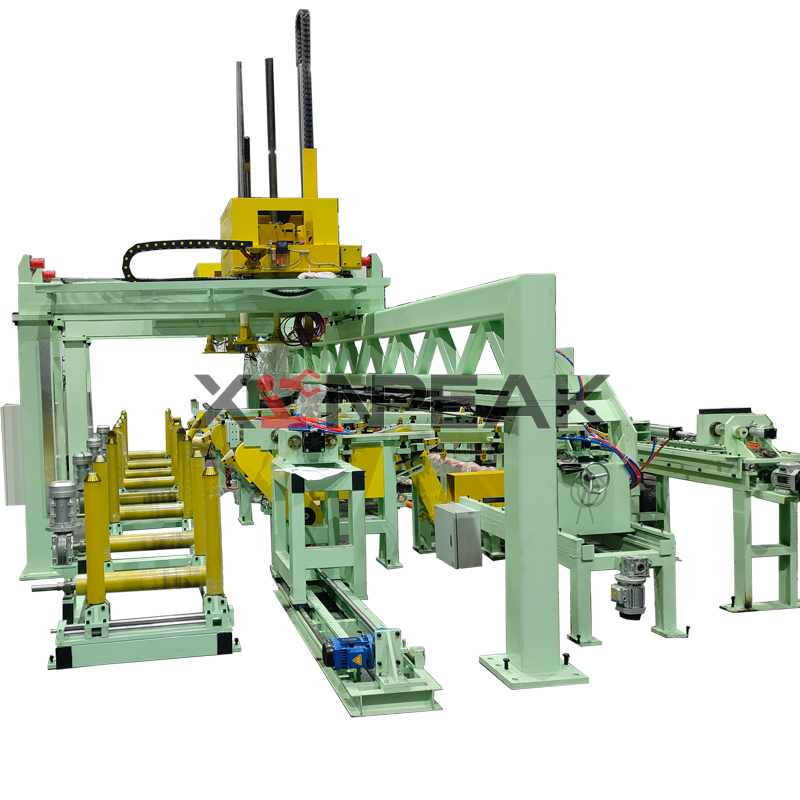
Поворотный механизм: позволяет захватному механизму вращаться вокруг определенной оси, регулируя положение стальных труб для различных конфигураций паллетирования (например, для упаковок квадратного или шестиугольного сечения).
Телескопический механизм: регулирует расстояние между захватным механизмом и стальной трубой, обеспечивая точный захват и предотвращая столкновения или неустойчивый захват.
Захватный механизм: разработанный с учетом формы и размера стальной трубы, он надежно захватывает трубу и предотвращает ее падение во время перемещения. Распространенные методы захвата включают электромагнитные присоски и механические захваты. Электромагнитные присоски подходят для захвата металлических стальных труб с помощью присасывания, в то время как механические захваты обеспечивают захват за счет усилия зажима.
Система управления
Система управления является «мозгом» паллетизатора стальных труб, отвечая за прием сигналов с производственной линии и управление исполнительными механизмами для выполнения соответствующих действий в соответствии с заданными программными инструкциями. Ее основные функции включают в себя:
Прием сигналов: получение информации, такой как поступление, количество и размер стальных труб, от производственной линии или других датчиков.
Программные инструкции: формирование программных инструкций для управления исполнительными механизмами на основе заданных правил и требований паллетирования. Например, положение и усилие захвата захвата можно регулировать в зависимости от диаметра и длины стальной трубы. Логика и управление движением: Сложные логические операции и управление движением реализуются с помощью ПЛК (программируемого логического контроллера) или промышленного компьютера для обеспечения точности и стабильности процесса паллетирования. Например, скоординированное движение подъемных, поворотных и телескопических механизмов контролируется для достижения точного размещения стальных труб.
Система датчиков
Датчики – это «глаза» и «уши» паллетизатора стальных труб, которые отслеживают изменения внешней среды и передают эту информацию в систему управления. К распространенным датчикам относятся:
Датчики положения: определяют положение стальных труб и захватных устройств для обеспечения точного захвата и размещения. Например, фотоэлектрические датчики определяют, достигли ли стальные трубы заданного положения.
Датчики зрения: используют камеры для фиксации положения и ориентации стальных труб и, в сочетании с алгоритмами обработки изображений, обеспечивают точное штабелирование. Датчики зрения могут определять форму, размер и положение стальных труб, предоставляя захватному устройству точную информацию о позиционировании.
Энкодеры и устройства обратной связи по положению: отслеживают движение манипулятора робота-паллетизатора для обеспечения точности штабелирования. Энкодеры обеспечивают обратную связь в режиме реального времени о положении и скорости манипулятора, позволяя системе управления оперативно корректировать параметры движения.
Системы питания и привода: Система питания и привода обеспечивает силовую поддержку движения паллетизатора стальных труб, гарантируя работу всех компонентов в соответствии с заранее запрограммированными процедурами. К основным системам питания и привода относятся:
Серводвигатели и приводы: обеспечивают движение сочленений манипулятора, обеспечивая высокоточное позиционирование и динамичный отклик. Сервоприводы обеспечивают высокую скорость отклика и точность позиционирования, отвечая высоким требованиям к управлению движением паллетизаторов стальных труб.
Гидроцилиндры: используются для привода компонентов, требующих больших усилий, таких как подъемные механизмы. Гидроцилиндры обеспечивают стабильное и значительное усилие, обеспечивая плавную регулировку высоты подъемного механизма.
Компоненты трансмиссии, включая реечные механизмы, шарико-винтовые передачи и синхронные ременные передачи, используются для передачи мощности от двигателя к исполнительному механизму. Выбор компонентов трансмиссии должен определяться с учетом фактических условий эксплуатации и точности позиционирования. Устройства безопасности
Устройства безопасности имеют решающее значение для обеспечения безопасной работы паллетизатора стальных труб и включают в себя:
Система аварийной остановки: эта система обеспечивает экстренное торможение с помощью физической кнопки или фотоэлектрического датчика для предотвращения несчастных случаев во время работы.
Световой барьер: эта система контролирует диапазон движения робота для предотвращения столкновений. Световой барьер образует световой барьер в зоне действия робота. Если объект попадает в зону светового барьера, робот немедленно останавливается, предотвращая столкновения.
Свежие новости
Каковы преимущества автоматических паллетизаторов стальных труб?
Эксплуатационные характеристики паллетизатора стальных труб
Что такое паллетизатор стальных труб с сервоприводом?
Какие материалы труб подходят для паллетизаторов труб?

Автоматизированные паллетизаторы стальных труб заменяют ручные операции автоматизированными технологиями, демонстрируя значительные преимущества в эффективности
Эксплуатационные характеристики паллетизатора стальных труб I. Подготовка к эксплуатации
Паллетизатор стальных труб с сервоприводом использует сервопривод в сочетании с интеллектуальной системой управления и прецизионной механической конструкцией для эффективной обработки
Паллетизаторы труб подходят для работы с различными трубными материалами, в первую очередь со стальными, пластиковыми и ПВХ трубами. Ниже приведено подробное описание:
Связаться с нами
Вы можете связаться с нами через следующие четыре способа. Мы ответим на ваш запрос в течение 2-8 часов после получения!
Позвонить нам
Отправить электронное письмо
Оставить сообщение
Добавить в WeChat или WhatsApp





